|
|
(광고) 단통법 시대의 인터넷가입 가이드(ver2.0) (234) |
 백메가 백메가 |
2015-12 |
1792692 |
25 |
|
2015-12
1792692
1 백메가
|
|
|
[필독] 처음 오시는 분을 위한 안내 (737) |
정은준1 |
2014-05 |
5267673 |
0 |
|
2014-05
5267673
1 정은준1
|
|
64863 |
무한잉크 어떤것이 좋은지요 (7) |
2CPU최주희 |
2014-12 |
6037 |
0 |
|
2014-12
6037
1 2CPU최주희
|
|
64862 |
공기 주입해주는 펌프 추천 좀 부탁드립니다 (2) |
박성만 |
2023-09 |
1274 |
0 |
|
2023-09
1274
1 박성만
|
|
64861 |
티스토리 접속시에 계속 돌아가요. |
테돌아이 |
2014-12 |
8726 |
0 |
|
2014-12
8726
1 테돌아이
|
|
64860 |
월세 내 놓기 (2) |
 무아 무아 |
2018-04 |
4292 |
0 |
|
2018-04
4292
1 무아
|
|
64859 |
서버보드가 고장났습니다. 도움부탁드립니다. (12) |
 심바트 심바트 |
2010-08 |
8242 |
0 |
|
2010-08
8242
1 심바트
|
|
64858 |
동영상 원격 인코딩은 불가능한가요? (3) |
김제연 |
2014-12 |
6182 |
0 |
|
2014-12
6182
1 김제연
|
|
64857 |
빔프로젝터 추천 부탁드려요 |
s김종화z |
2018-04 |
3801 |
0 |
|
2018-04
3801
1 s김종화z
|
|
64856 |
Dell T5820 전원 안 켜지는 문제 (4) |
VSPress |
2022-02 |
1916 |
0 |
|
2022-02
1916
1 VSPress
|
|
64855 |
신혼부부용(?) 드릴 추천 부탁드립니다. (8) |
viper9 |
2014-12 |
6325 |
0 |
|
2014-12
6325
1 viper9
|
|
64854 |
먼지가 많은 지하환경에서의 서버 운용 (16) |
이희주 |
2019-06 |
3533 |
0 |
|
2019-06
3533
1 이희주
|
|
64853 |
DELL SFF 2U 8BAY Size 질문 (2) |
통신보안 |
2020-09 |
2219 |
0 |
|
2020-09
2219
1 통신보안
|
|
64852 |
WD 그린 2TB HDD문의 (9) |
 윤치열 윤치열 |
2010-09 |
8694 |
0 |
|
2010-09
8694
1 윤치열
|
|
64851 |
v3 사용 계약에 관련 문의입니다. (7) |
허인구마틴 |
2020-09 |
2763 |
0 |
|
2020-09
2763
1 허인구마틴
|
|
64850 |
Remux 파일들은 어떻게 변환하시는가요? (4) |
분당김동수 |
2018-05 |
9382 |
0 |
|
2018-05
9382
1 분당김동수
|
|
64849 |
[질문] DDR4 메모리 양/단면 호환질문 (6) |
 일반유저 일반유저 |
2019-06 |
5122 |
0 |
|
2019-06
5122
1 일반유저
|
|
64848 |
윈도우10 블루스크린 (6) |
 iroo iroo |
2020-09 |
3636 |
0 |
|
2020-09
3636
1 iroo
|
|
64847 |
KT기가 인터넷.. (19) |
한성호 |
2015-01 |
6064 |
0 |
|
2015-01
6064
1 한성호
|
|
64846 |
알리발 메모리인데 한번 봐주세요 (6) |
돔이 |
2018-05 |
5588 |
0 |
|
2018-05
5588
1 돔이
|
|
64845 |
절전모드로 꺼진 하드 디스크가 이유없이 깨어나는 문제 (9) |
 리나 리나 |
2016-03 |
6671 |
0 |
|
2016-03
6671
1 리나
|
|
64844 |
windows 멀티부팅 이렇게 가능한지요? (5) |
 방o효o문 방o효o문 |
2010-10 |
8024 |
0 |
|
2010-10
8024
1 방o효o문
|



회사에 라이센스도 없고..
있어도 쓸줄 모르는... 뭐 그런 상황입니다. 흑흑.
https://goo.gl/Z8QLbk
이걸참조하세요.
--------------------
가령
직교좌표계 P1(x1,y1,z1)
x1 = 0
y1 = 0
z1 = r
인 위치에서
반지름을 유지하면서 z축에서 theta만큼 x축에서 phi만큼 돌아간 점 P2(x2,y2,z2)
x2 = r sin(theta) cos(phi)
y2 = r sin(theta) sin(phi)
z2 = r cos(theta)
점 P1과 P2간의 거리는
square_root( (x2-x1)^2 + (y2-y1)^2 + (z2-z1)^2 )
r, theta, phi 아는 값이면 P2의 좌표가 나오고, P1과 P2의 거리가 계산됩니다. 계산은 엑셀 같은 것으로 하면 되고요.
말씀하신대로 처음 위치는 점 P0 (0 0 0 )에서 점 P1인데 각도가 틀어져 P1에서 P2로 이동..
그 뒤에는 P0 - P2를 기준으로 해서 틀어진 걸 계산...
봐도 복잡해지네요...
(0,0,0)은 고정한 채 P1을 theta, phi만큼 돌린 점 P2(x2,y2,z2)를 생각하면 됩니다.
반지름이 1000이고 z축에서 1도 x축에서 3도 틀어진 경우라면 P1에서 P2로 움직인 거리는 5.5555로 계산되는군요.
엑셀로 quick and dirty로 만든 것을 자료실에 올려두겠습니다. 한시간 뒤에 지움
이걸 변형시켜 사용하세요.
현재 말씀하신 것중에 정의된 것이 세타값은 z축이 틀어진 각도이고, 파이값은 x축이 틀어진 각도이죠?
현재 오차를 구해야하는 것이.. 그림1과 2가 서로 다른 축을 기준으로 하는 것인데 제가 설명이 부족했네요.
응용을 하면 될 것 같은데.. 일단 계산 해봐야겠습니다!
감사합니다.
(0,0,0)에 있는 녀석과 P1에 있는 녀석이 완전히 직선을 이뤄졌다는 보장이 없어져버려서...
P1이 살짝 틀어진 경우에는 오차가 상당히 클 것 같습니다... 목표가 40000까지의 거리에서 차이를 비교해야되서요..
구면 좌표 생각할 거도 없이 직각좌표상에서
C1(0,0,0)에서 거리 r1 떨어진 곳에 있는 점 P1(r1,0,0)이 y축 방향으로 theta만큼 회전하여 P2로 갔다고 하면 P2의 좌표는
x2 = r1 cos(theta)
y2 = r1 sin(theta)
z2 = 0
P1~P2 변위는
sqrt( ( r1 - r1 cos(theta) )^2 + ( r1 sin(theta) )^2 ) = r1 * sqrt( 2 - 2 cos(theta) )
가령 r1이 1000이고 theta가 1도(1/180 radian)라면 변위는 5.5555
그런데 P2가 다시 원점이 아닌 P2로부터 거리 r2 떨어진 C2라는 점을 중심으로 phi만큼 회전하여 P3라는 점으로 이동했다면
P2~P3 변위는 r2 * sqrt( 2 - 2 cos(phi) )
가령 r2가 50이고 phi가 3도(3/180 radian)라면 변위는 0.8333
이 변위 값은 C2가 어느 위치이건 phi가 어느 방향으로 회전을 했건 마찬가지입니다.
P1~P3의 변위를 알려면 두번째 회전의 중심 C2의 위치와 phi가 어느 방향으로 회전을 한 것인지를 알아야 계산할 수 있습니다.
그러나 어느 한계에 있는 지는 알 수 있습니다.
P1, P2, P3 세 점으로 이루어지는 삼각형에서 삼각형 두변의 합은 다른 한변보다 크기 때문에
( P1~P2 + P2~P3 ) > ( P1~P3 )
어느 점을 중심으로 어느 방향으로 회전을 했건 간에 두번 세번의 회전이 있을 때 전체 변위는 각각의 변위를 합한 것보다는 작다는것이죠.
반지름 : r
회전 각도 : theta
이러면 변위는
r * square_root( 2 - 2 cos(theta) )
요걸로 계산하여 몽땅 합쳐주면 실제 변위는 그것보다는 작은 값이 됩니다. 최종 오차는 이런저런 오차를 단순 합산한 것이 한계치
변위의 한계가 아니라 정확한 값을 알려면 물론 어느 점을 중심으로 어느 방향으로 회전했는지를 알아야겠죠.
계속 삼각함수로 까대기 하고있었는데 좀 가닥이 잡히네요.
일단 또 해봐야지요... 흑흑...
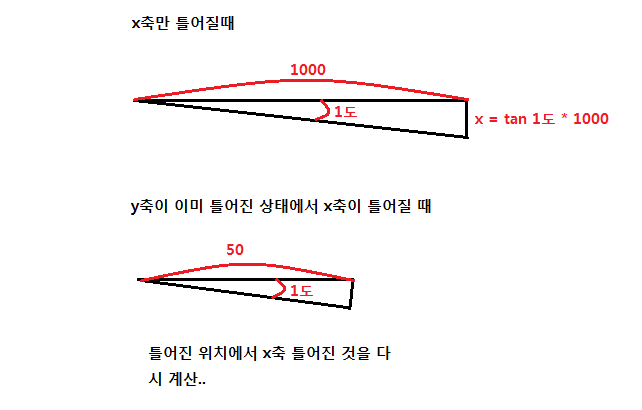
위에 두 그림에서 하나는 1000, 하나는 500. 왜 다른 거죠?
1번 그림은 한축만 틀어진 것이고
2번 그림은 1번을 진행하기 전에 이미 2번과 같이 틀어진 상태에서 다른 축으로 1번 그림으로 진행하는 것입니다.
현재 상황이 O0 (0, 0, 0) P1(0, 0, 50)을 잇는 직선이 있고 P1(0, 0, 50)에서 C1(1000, 0, 50)까지의 90도 꺽인 직선이 있습니다.
1번은 P1에서 C1까지인데 P1을 중심으로 y축이 틀어졌을 경우의 그림이고
2번은 O0에서 P1까지인데 O0을 중심으로 x축이 틀어졋을 경우의 그림입니다.
최종은 2번이 진행되어 P1`이 (0, 1, 49)의 위치로 간 상태에서 P1`에서 C1`(1000, 1, 49) 까지가는데 이게 또 y축이 틀어졌을 경우 원래 도달 위치인 C1에서 얼마나 틀어지냐 이것입니다.
O0에서 P1까지의 길이는 50 고정이고 P1에서 C1 까지는 거리가 아닌 (1000, y, z) 까지 도달해야 합니다.